
Signa SP / LOCALITE
Der LOCALITE iMRI Navigator ist ein bildgestütztes Navigationssystem, das Eingriffe unter Einsatz von interventioneller Bildgebung (Kernspintomographie) unterstützt und diese Eingriffe präziser und effizienter gestaltet. Der iMRI Navigator wird in der Neurochirurgie, im HNO-Bereich für Operationen an der Schädelbasis, für die orthopädische Chirurgie und für die interventionelle Radiologie (minimalinvasive Leberchirurgie) genutzt.
Systemkomponenten
Interventionelle Kernspintomographen liefern im Gegensatz zu konventionellen Systemen Bilder
während eines operativen Eingriffs. Diese so genannten Realtime-Schichtbilder enthalten Bildinformationen
über den aktuellen Zustand des Patienten. Die räumliche Ausrichtung des jeweiligen Schichtbildes wird
interaktiv durch Position und Orientierung verschiedener Operationswerkzeuge (Pointer, Mikroskop,...) mit Hilfe
eines optischen Trackingsystems bestimmt. Die LOCALITE Navigationsumgebung unterstützt unterschiedliche Arten
von Kernspintomographen: offene Systeme, die für den interventionellen Einsatz konzipiert sind, aber auch
konventionelle, geschlossene Systeme, die speziell für den intraoperativen Einsatz modifiziert wurden.
LOCALITE unterstützt dabei sowohl fest eingebaute Komponenten wie Trackingkamera und Monitor, konzipiert
und gestaltet aber auch spezifische Lösungen wie Beamer-Projektionstechniken oder separate
Trackingsystemanbindungen.
Planung
Integraler Bestandteil des LOCALITE iMRI Navigators ist eine Planungsumgebung. Anders als bei herkömmlichen
Navigationssystemen ist man jedoch für die Planung nicht ausschließlich auf präoperativ erhobene
Bilddaten angewiesen, sondern kann intraoperativ die Planung immer wieder auf den aktuellen Stand bringen. Daher
stehen die Datensätze, die mit dem interventionellen MR erzeugt werden stets im Zentrum der Planung. Alle
anderen Daten: geplante Trajektorien, Bilddaten anderer Modalitäten, Thermometrieplanungen werden hierzu in
Bezug gesetzt. Besonders zur Wahrnehmung und zur Kompensation des brainshifts in der Neurochirurgie
stellen die aktualisierten Bilddaten und die dazu in Bezug gesetzten Planungsdaten eine deutliche
Qualitätssteigerung dar.
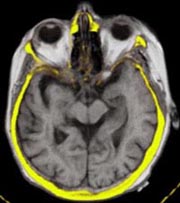
Koregistrierung und Datenfusion
Mit Hilfe des LOCALITE iMRI Navigators können verschiedene Bildmodalitäten mit den interventionell
erhobenen MR-Daten koregistriert und fusioniert dargestellt werden.
CT: Die Koregistrierung von CT- und iMRI-Volumendaten erfolgt derzeit sowohl markerbasiert als auch
semiautomatisch auf Basis des Mutual Information Algorithmus. Für die fusionierte Visualisierung existieren
eine Reihe unterschiedlicher Darstellungen.
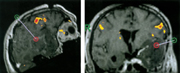
fMRI/PET: Auch die Integration funktioneller Bilddaten ist möglich. Hierzu wird parallel zum
fMRI-Volumendatensatz ein T1-gewichteter 3D-Datensatz mit den funktionellen Daten präoperativ erhoben.
Dieser kann ebenfalls semiautomatisch mit hoher Genauigkeit mit dem interventionellen Datensatz koregistriert
werden. Als Visualisierungsmethoden werden ähnliche Methoden verwendet, wie für die CT-Daten.
Navigation und online Bildgebung
Auf Basis der Zugangsplanung oder komplexerer Interventionsplanungen (z.B. Thermotherapien) kann der Chirurg nun
auf aktualisierten Bilddaten navigieren. Dies erfolgt auf zweierlei Art. Zum einen kann er den der Planung zugrunde
liegenden 3D-MR-Datensatz von Zeit zu Zeit aktualisieren. Zusätzlich kann er sich eine Schichtebene mit seinem
getrackten, aktuell genutzten Werkzeug auswählen. Diese Schicht wird dann vom Kernspintomographen gescannt.
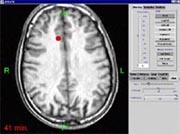
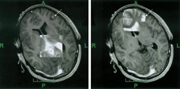
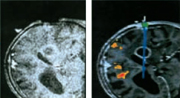
Nachteile der Realzeit-Schichtbilder sind die lange Scannzeit, ca. 2-5 Sekunden, und die vor allem bei
Kernspintomographen mit niedriger Feldstärke (0,2 oder 0,5 Tesla) schlechte Bildqualität. In der
Abbildung ist links ein Realzeit-Schichtbild (0,5 Tesla) und recht ein aus einem präoperativen
3D-Datensatz ermitteltes Bild dargestellt (3D-Sequenz, 0,5 Tesla).
Die Navigationsumgebung wird nun genutzt, um in speziellen Darstellungen Realzeit- und Planungsdaten (3D-MR-Daten)
zu vergleichen. Werden Abweichungen entdeckt, kann mit der Aufnahme eines neuen 3D-Datensatzes reagiert werden.
Die Planung kann rasch aktualisiert werden. Dieser Prozess kann mehrfach nach Bedarf wiederholt werden. Dieses
Vorgehen wird auch iterative Navigation genannt.
Wichtig ist, dass es sich für den Arzt bezüglich dieser beiden Bildmodalitäten nicht
um eine Entweder-Oder-, sondern vielmehr um eine Sowohl-Als-Auch-Betrachtung handelt. So wird durch das
rechte Bild ein Bezug zur Planung hergestellt, und durch das linke Realzeit-Schichtbild kann die
"Güte" dieser eigentlich "veralteten" Bilddaten beurteilt werden.
Beratung, Forschung und Entwicklung
Durch unsere langjährige Erfahrung in der Anbindung unterschiedlicher Systeme und Technologien im Umfeld
der interventionellen Nutzung von Kernspintomographen besitzt LOCALITE ein breites Repertoire an Verfahren,
Technologien und leistungsstarken Partnern, um eine auf Ihr Problemfeld maßgeschneiderte Lösung
gemeinsam mit Ihnen zu erarbeiten. Gerne unterstützen wir Sie in Planung und Konzeption navigierter
Lösungen für die Kernspintomographie.